জেনেভা মেকানিজম, যাকে জেনেভা স্টপ নামেও ডাকা হয়, যা আন্তঃসত্মত রোটারি গতি তৈরির জন্য সর্বাধিক ব্যবহৃত ডিভাইসগুলির মধ্যে একটি, যা বিকল্প গতির বিকল্প দ্বারা চিহ্নিত করা হয় এবং দিকের কোনও উল্টোদিকে বিশ্রাম না করে। এটি সূচিকরণের জন্যও ব্যবহৃত হয় (যেমন, একটি নির্ধারিত কোণের মাধ্যমে একটি শ্যাফ্ট ঘোরানো)।
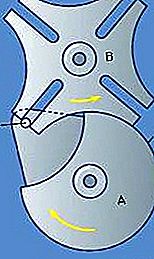
চিত্রটিতে ড্রাইভার এ একটি পিন বা রোলার আর বহন করে যা অনুসরণকারী বি এর চারটি রেডিয়াল স্লটে ফিট করে the সম্পূর্ণরূপে নিযুক্ত হয়। প্রদর্শিত অবস্থানে, পিনটি স্লটগুলির মধ্যে একটিতে প্রবেশ করছে, এবং ড্রাইভারের আরও ঘোরার পরে, এটি স্লটে চলে যাবে এবং 90 through এর মাধ্যমে অনুসরণকারীকে ঘুরবে ° পিনটি স্লট ছাড়ার পরে, চালকটি 270 এর মধ্যে ঘোরান will যখন অনুসরণকারীটি থাকে — অর্থাৎ দাঁড়িয়ে থাকে। জেনেভা পদ্ধতিতে স্লটের সর্বনিম্ন ব্যবহারিক সংখ্যা 3; 18 এরও বেশি কদাচিৎ ব্যবহৃত হয়। যদি স্লট পজিশনের একটি অবরুদ্ধ না হয় তবে ড্রাইভার যেগুলি করতে পারে তার সংখ্যা সীমিত। কথিত আছে যে জেনেভা প্রক্রিয়াটি সুইচ প্রহরী দ্বারা ওয়াচ স্প্রিংয়ের ওভারওয়াইন্ডিং রোধ করার জন্য উদ্ভাবিত হয়েছিল। এই কারণে এটি কখনও কখনও জেনেভা স্টপ বলা হয়।
প্রারম্ভিক গতি-চিত্র প্রজেক্টর জিনভা প্রক্রিয়াটি শাটারটি বন্ধ থাকাকালীন ফিল্মটিকে দ্রুত অগ্রসর করার জন্য ব্যবহার করেছিল, তারপরে শাটারটি খোলা থাকার সাথে সাথে একটি আবাসকালীন সময় ছিল।










![ট্যুর যুদ্ধ ইউরোপীয় ইতিহাস [732]](https://images.thetopknowledge.com/img/world-history/1/battle-tours-european-history-732.jpg "ট্যুর যুদ্ধ ইউরোপীয় ইতিহাস [732]")

